
Galileo will provide a High Accuracy Service (HAS) with positioning performance in the 20-cm range, disseminating Precise Point Positioning (PPP) corrections through the Galileo E6-B signal. Test results of a data encoding and dissemination scheme in different user environments demonstrate a reception time of the corrections in a few seconds in good channel conditions, and less than half a minute with severe channel impairments.
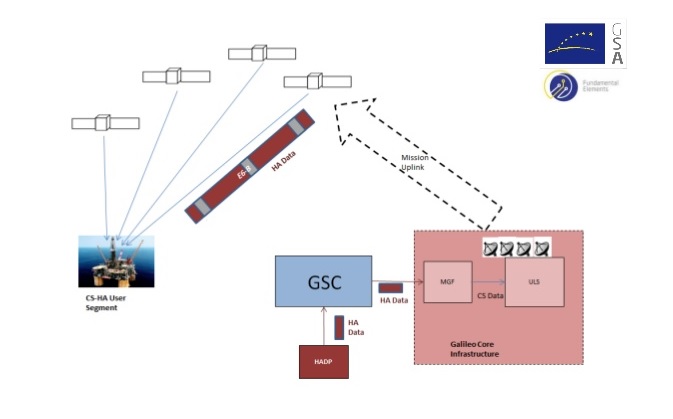
Galileo High Accuracy Service Architecture
The Galileo High Accuracy Service (HAS) will provide Precise Point Positioning (PPP) corrections enabling position accuracies in the 20-cm range. Such level of accuracy, and the fact that it will be provided for free (refer to European Commission Implementing Decision 2018/321 of 2 March 2018), may find application in several market segments, from agriculture to Intelligent Transport Systems (ITS). Given its wide range of application, the Galileo HAS message will be potentially received under many different propagation conditions where the reception of the corrections could be impaired by obstacles such as trees or buildings. Thus, an effective data dissemination scheme is of paramount importance to reduce the data reception time and to provide sufficient redundancy to cope with signal blockage and low satellite availability. In this respect, an encoding and dissemination scheme based on high-parity vertical Reed-Solomon codes has been recently proposed: “Transmission of satellite navigation message into multiple pages encoded for optimal retrieval at receiver in a fully interchangeable way”, Ignacio Fernández Hernández. This article provides an experimental evaluation of this scheme for the Galileo E6-B signal component, with focus on the Time To Retrieve Data (TTRD), i.e. the time required to retrieve a full HAS message. The analysis shows that Galileo E6-B PPP corrections of several thousand bits can be received within 30 seconds with a probability higher than 90% under challenging conditions with high vehicle dynamics and obstacles causing page erasures.
Galileo E6-B Page and HAS Encoding Scheme
The Galileo E6-B message is organized in pages of 492 bits, which are obtained after Forward Error Correction (FEC) and de-interleaving. One page is transmitted every second. The page also includes a 24-bit CRC.
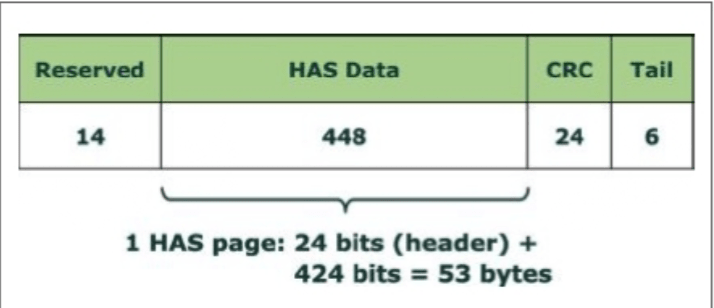
Galileo E6B page after FEC and de-interleaving
Each HAS page is divided in a 24-bit header and a 424-bit body field. In the page body, consecutive bits are grouped into symbols each of 8 bits (one byte). The 424-bit body fields forming a HAS message are stacked in a matrix where each row corresponds to a page (here referred as the 424-body field). Then, each 8-bit symbol column is “vertically” encoded separately into a Reed-Solomon RS(255, 32, 8) code, which transforms a vector of up to 32 information symbols over GF(8) in an encoded vector of 255 elements, forming a total of 53 (424 bits/8 bits per symbol) separate messages. Since systematic encoding is used, if a message contains less than 32 pages, the message can be shortened, so the all-zero pages will not be transmitted. Thus, if the number of unencoded pages is K, there will be 32—K encoded pages of all zeros and since these pages will not be transmitted there will be
N = 255 – (32 – K)
valid encoded pages. This result can be obtained by using a new encoding matrix of size (N x K), by removing the rows and columns from number (K+1) to number 32 in the original Reed-Solomon encoding matrix.
The encoding process represented as a matrix multiplication is depicted on the following figure. Each satellite will transmit a different subset of pages minimizing the probability that a receiver collects duplicated pages. Finally, the 24-bit HAS page header shown in previous figure, which is transmitted unencoded, contains a HAS service status flag, the Message Type (MT); the Message ID (MID), the size K of the unencoded message, and the message Page ID (PID).
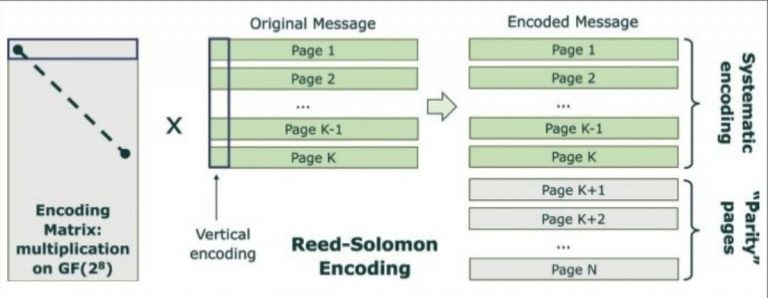
Encoding process represented as a matrix multiplication
We will focus now on the Galileo HAS message. We define a flexible message type (MT1) that can transmit any type of HAS satellite correction data. We take as a reference the satellite correction data provided in the Compact State-Space Representation (CSSR) used for QZSS and defined in “Compact SSR Messages with Integrity Information for Satellite Based PPP-RTK Service“. In this work, two MT1s are considered: MT1-orb, providing general HAS information, satellite and signal masks, orbital corrections, biases, and signal quality monitoring, and MT1-clk, containing clock corrections. This separation allows the clock corrections to be refreshed at a higher rate than the rest. The unencoded MT1-orb message is formed by 15 pages (6,360 bits) leading to 238 encoded pages (100,912 bits). The MT1-clk message is formed by two pages (848 bits) and 225 encoded pages (95,400 bits) will be available for dissemination, but the messages will be punctured so not all of the encoded pages will be broadcast. This setup allows fitting orbit, clock and bias corrections for around 50 to 60 satellites, depending on the amount of biases transmitted.
We define MT1-orb and MT1-clk update rates of 120 and 10 seconds, respectively, and where two MT1-clk pages are transmitted consecutively every 10 seconds. We denote this configuration Conf (10,2). HAS message rates are under study and may vary when the Galileo HAS is operational, but we consider them a good benchmark for the analysis.
After encoding, 238 MT1-orb pages are available for transmission. Within 30 seconds, the first connected satellite will sequentially transmit the pages with PID in the [1, 24] range, in blocks of eight seconds. Satellite number 2 will broadcast pages with PID from 25 to 48. This process will continue until all the available MT1-orb pages (238) are allocated. At this point, the page index will be reset and the allocation process will continue in zig-zag. For example, satellite 10 will transmit pages from 217 to 238. Then it will continue with pages 1 and 2. Satellite allocation to the different rows of the scheme in the following figure (where MT1=MT1-orb and MT2=MT1-clk) will be performed dynamically, depending on the satellites connected to ground at that time, i.e. the satellites transmitting PPP corrections. Note that, out of the full constellation, only a subset of satellites is connected, which we assume to be 20 satellites in this work.
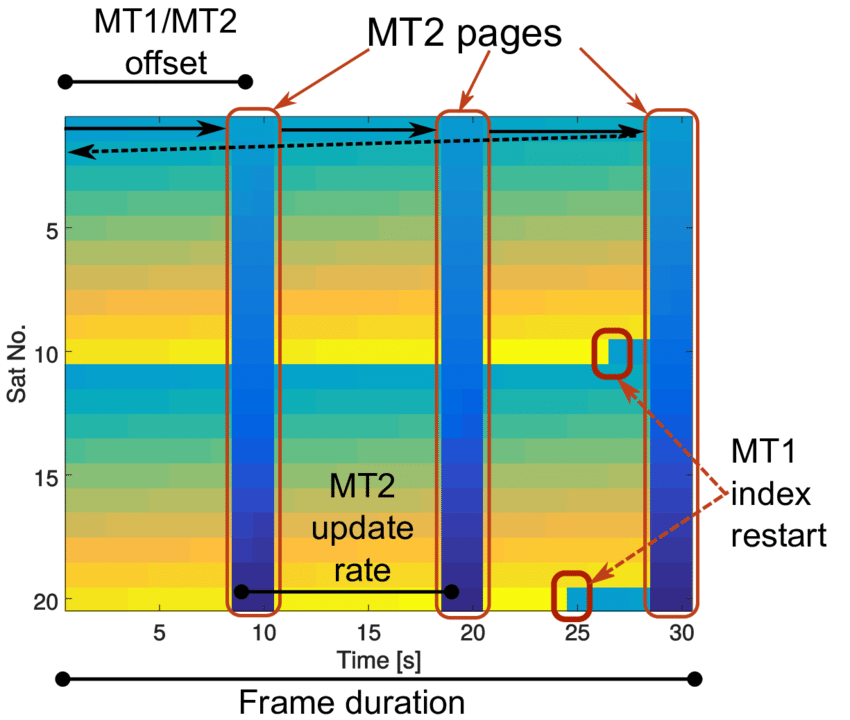
Page allocation to 20 satellites as a function of time
Evaluation methodology
We define TTRD as the time required by a Galileo E6-B receiver to recover at least one MT1-orb and one MT1-clk message. In order to experimentally evaluate the TTRD, several data collections under different propagation conditions were performed. Real E6-B data were used to determine the effect of the communication channel on the reception of the pages, as if the pages transmitted HAS data from the Signal-In-Space (SIS). In particular, real Galileo E6-B signals were used to construct page reception maps as swho next. In the figures, dark blue areas indicate that a page was received without errors whereas white areas correspond to epochs when the signal was not tracked and the corresponding E6-B page was not decoded. Other colours indicate that the page was received with errors. These page reception maps were used to take into account the effect of a real communication channel on the scheme. Only when a page was received without errors, it contributed to the HAS message.
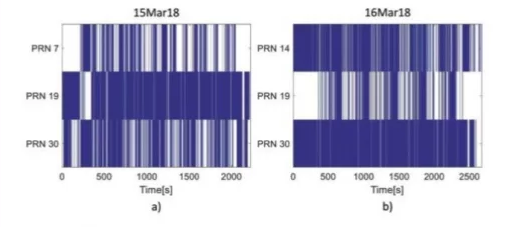
Page reception maps 15-03-2018 (part a) and 16-03-2018 (part b) scenarios
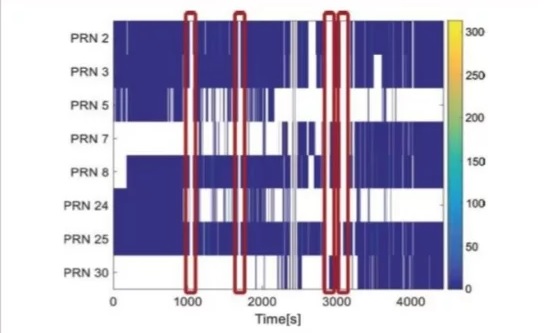
Page reception map 26-02-2019 A test. The presence of complete E6-B page outages due to tunnels and other effects are highlighted
A schematic representation of the TTRD evaluation methodology is depicted next. Several processing runs were performed where a receiver starts the decoding process in a random position in the generated scenario. The number of decoded MT1-orb/MT1-clk pages is increased according to the page reception map and the dissemination scheme. The process ends and the TTRD is determined when 15 MT1-orb pages and two MT1-clk pages are collected. At a given epoch, a page contributes to the MT1-orb/MT1-clk count only if it was not received before. If a new MID is transmitted before decoding the full message, the process is restarted. Thus, the TTRD also accounts for possible resets due to new issues of data. Finally, the average TTRD is obtained by averaging the TTRDs obtained during the different processing runs. In the analysis, we also considered different availability conditions: the TTRD was determined either using all the satellites in view or by randomly removing one third of the satellites available. This second scenario accounts for the fact that not all the satellites will be connected and able to broadcast valid HAS pages.
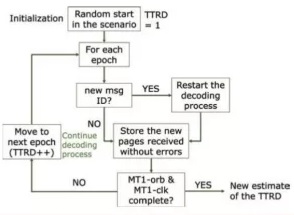
Methodology adopted for TRRD evaluation
Experimental setup
The experimental setup adopted to collect real Galileo E6-B pages consisted of a vehicle equipped with a multi-constellation, multi-frequency antenna (Zephyr 3 antenna from Trimble). The antenna was steadily mounted on the roof of the vehicle through a magnetic lock. A commercial-off-the-shelf (COTS) E6-B capable receiver (AsteRx4 from Septentrio) was connected to the antenna and used to collect E6-B pages. Several data collections were performed under dynamic conditions considering different scenarios and environments. Out of these, several experiments were conducted inside the campus of the Joint Research Centre (JRC), Ispra, Italy. The campus features 36 km of roads with trees and tall buildings that obstruct signal reception. Following figure provides a view of the van used for the experiments performed inside the JRC campus. Other experiments were conducted in a highway scenario where the driver reached speeds close to 130 km/h. Several hours of data were collected considering heterogeneous propagation conditions. Some of the data collected during these tests had been used before by the authors to characterize the Galileo E6-B propagation channel.

Van used for the experiments performed inside JRC campus
A summary of the conducted experiments is provided in the following table. Each experiment is identified by the date when it was conducted and by a letter, if more than one test was performed during the same day. The table also provides the maximum number of Galileo satellites tracked during each experiment. Note that this was the maximum number and that, in some cases, some satellite signals were very weak and tracked in a discontinuous way. These effects are taken into account by the page reception maps.
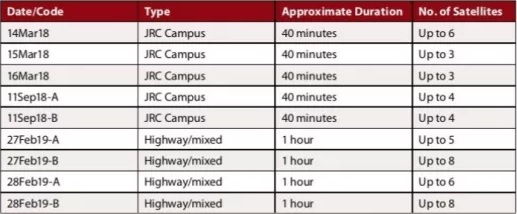
Summary of the different data collections in order to characterize the TTRD
Experimental results
As summarized in previous table, different availability conditions were observed during the experiments. The tests conducted inside the JRC campus were the most challenging with a number of satellites varying from a minimum of three to a maximum of six. In the highway tests, the number of satellites varied from five to eight. In the JRC campus, several obstacles significantly reduce E6-B page decoding. For this reason, higher TTRD values were observed, in average, in the tests conducted inside the JRC campus.
We obtained 20,000 TTRD realizations at random starts and with different satellite page reception mapping for the five JRC campus tests and the four reception configurations. These TTRD realizations were used to compute the box-plots shown in the following figure. More specifically, each column in the four boxes provides the median, depicted as the central red line inside each rectangle, and the 25% and 75% quantiles that define the two horizontal sides of the rectangle. The two extreme whiskers extending outside the rectangle define the extreme values considered as inliers. On the contrary, red crosses are TTRD values considered as outliers. From the figure, it emerges that the worst TTRD values where observed for the tests conducted on 15-Mar-2018 and 16-Mar-2018. This result simply reflects the availability conditions: in these two cases only three satellites where available. Despite this fact, the average TTRD was always lower than 11.3 seconds, and with a 95% quantile lower than 18 seconds with the three satellites available. When the satellite availability is reduced to two, the average TTRD is increased to about 18 seconds. In this case, the 95% quantile of the TTRD increases to 40 seconds, as shown in table below.
In the “1/3” configuration, figure shows sporadically large TTRD values, even beyond 100 seconds. This is true for the 15-Mar-2018 and 16-Mar-2018 scenarios, which are characterized by a reduced availability of two transmitting satellites, as one is randomly removed (see receptoin maps above). Page reception was highly discontinuous and, at any time, there was only one satellite with an elevation angle higher than 35 degrees. Since satellite availability was reduced by randomly removing one satellite, when the high-elevation satellite was removed, the reception of the HAS message was significantly affected, most of all in a portion of the test, where both remaining satellites were below 20 degrees of elevation. These conditions justify the large TTRD values sporadically observed. Despite these challenging reception conditions, the probability of having a TTRD lower than or equal to 30 seconds was always higher than 0.91 for all the experiments conducted inside the JRC campus and for reduced satellite availability conditions.
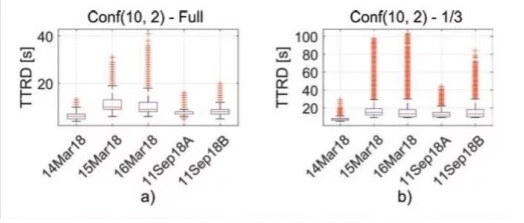
Box plots with statistical values (median, first and third quartile) of the TTRD observed when considering the five tests conducted inside the JRC campus. a) Conf(10,2) with all satellites. b) Conf(10,2) with one third of the satellites

Summary statistics obtained for the five tests performed inside the JRC campus
Following figure and table provide the results for the four highway scenarios. They show an average TTRD lower than 8.5 seconds for all four tests under full availability conditions. A larger 95% quantile was however obtained: around 25 seconds in the worst case. This higher 95% quantile is justified by the fact that experiments were conducted in mountain areas with tunnels and deep valleys. When the vehicle was passing under a tunnel, all the signals were lost. In some cases, due to bad reception conditions, the receiver was struggling to recover the signals causing long TTRDs. During the test conducted on 28-Feb-19A, the receiver had problems to recover from tunnels and from total loss of signals. This fact can be clearly seen in the page reception map recorded during the 28-Feb-19A test. While the receiver was able to track up to eight satellites, there are few portions of the dataset where no E6-B page is recovered. These data gaps are longer than 60 seconds and cause large TTRDs. This fact explains the larger 95% quantile as compared to other tests. In the “1/3” configurations, average TTRDs rose up to 11.2 seconds, and the 95% quantile to 32 seconds. The probability of correctly decoding the HAS navigation message within 30 seconds was however quite high and above 94%.
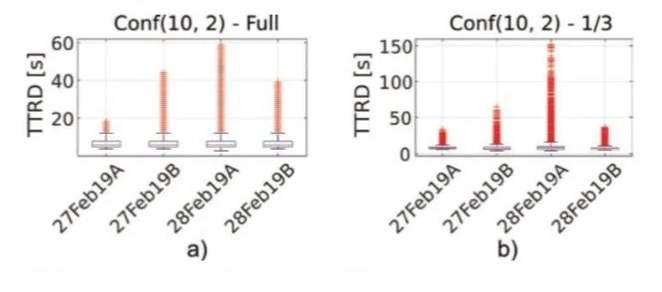
Box plots with statistical values (median, first and third quartile) of the TTRD observed when considering the four tests conducted in a highway environment. a) Conf(10,2) with all satellites. b) Conf(10,2) with one third of the satellites

Summary statistics obtained for the five tests performed in a highway environment
Conclusions
This article has evaluated the encoding and dissemination scheme for transmitting PPP corrections over the Galileo E6-B signal for the Galileo High Accuracy Service. The E6-B signal provides 448 bits per second for HAS, and the encoding scheme uses vertical Reed-Solomon encoding with very high parity and assigns different parts of the encoded message to different satellites. While the dissemination scheme provides flexibility in the message length and content, the analysis focuses on a two-page message with the clock corrections and a 15-page message with the remaining information: masks, orbit corrections, signal biases, and signal quality indicators. TTRD (time to retrieve data) is the reference metric used and measures the time to receive the necessary HAS data to apply the full correction set.
We have used real Galileo E6-B data collected under dynamic conditions in the JRC campus and its surroundings. As HAS data is not transmitted yet, the performance was evaluated in post-processing, but using the real data to generate page reception maps and determine the impact of the communication channel.
The results show that, in good visibility conditions and with enough satellites, mean TTRDs are between six and nine seconds. In cases with only two transmitting satellites at low elevations and channel impairments, TTRDs are below 30 seconds with probabilities higher than 90%. The availability of a high elevation satellite, which is less affected by obstacles and propagation effects, is particularly beneficial for reducing TTRD. These results suggest that, when Galileo HAS is finally transmitted in the SIS, HAS corrections should be timely and readily available in most user environments.
Acknowledgments
The authors would like to thank GSA (C. Hernández, J. Simón, J. de Blas, A. Mozo), ESA (D. Blonski, P. Zoccarato), and AALECS (J. Calle, S. Cancela) for their contributions to the Galileo HAS. The support of G. Vecchione and M. Susi is also acknowledged.
Authors
Daniele Borio, sientific policy officer at the European Commission Joint Research Centre in the fields of digital and wireless communications, location and navigation.
Tomasso Senni, EGNSS signal advisor at the European Commission DG DEFIS.
Ignacio Fernández-Hernández, technical lead of the authentication and high accuracy services of Galileo first generation at the European Commission, DG DEFIS.